This is the second step in multi step process of completing a RayMarine Axiom Integration into the boat sub systems. It’s been a while since I’ve blogged about this. We are more than half way through the setup. What we have so far is an operational rear camera. It’s on the rear of boat. So far we have done is to extend the functionality of the “The Nauti Oar“. Furthermore, things have kind of morphed into a multitude of other sub projects that are all inter related. It all really started when I began to run ethernet and power for the rear view camera. More importantly, what I have now is an upgrade path for the boat systems that are part of the bigger picture.
- NMEA 2000 Network & Gateway Device (SeaTalk ng to NMEA 2000)
- Expansion of the Seatalk and SeaTalk HS Networks
- Fox Marine Gateways – NMEA 2000
First, to start at the beginning ,this all went off the rails when I decided I wanted to get some relevant data on the Axiom (RPM, engine oil pressure, temperature). Secondly, poking around in the Axiom lead to this situation. Thirdly, what new additional systems will be in place going forward will allow me to complete the foundational activities to modernize the boat. This will allow me to get near real time sensor data for digital and analog provided sources. Once again, there are things I wish I could see from the engines and instrumentation telemetry wise that I can’t get with the twenty year old plus analog gauges. Lastly, I’m expand upon the existing building blocks to get the extended functionality.
RayMarine Axiom Integration – Fox Engine Gateways / NMEA2000
To start, we are only going to focus on the the RayMarine Axiom integration with respect to the NMEA network & Fox Engine Gateways in this segment. My analog gauges are starting to show their age and act flaky. I was debating for a bit about adding the engine data on the Axiom. After looking for gauges, I just decided to bite the bullet and invest in two Fox Marine Engine gateways. My two Mercury 7.4 MPI engines are MEFI-3. Fox Marine has several gateways, these were specific for my ECU’s. Keep in mind that these engine have no input for oil pressure to the MEFI engine controller. So I had to buy the additional oil pressure and temperature sender with the kit. Below is the NMEA 2000 network architecture for the gateways. We are going to follow this loosely.
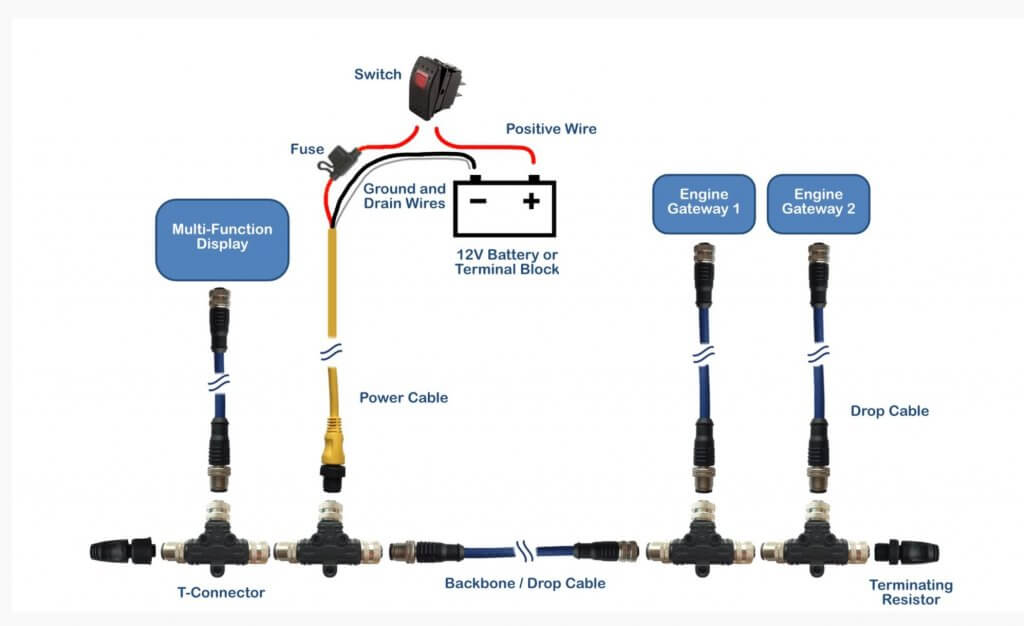
Fox Marine Gateways
To start , the engine gateways are NMEA 2000. So I need to get them to interface with the SeaTalk network. Luckily, someone already started on this at the helm. Unfortunately, my engines are not close the helm. I guess that is good thing ? So, the conversion from NMEA200 to SeaTalk is pretty simple, it just requires a 10 meter backbone cable, a Raymarine SeaTalk 5 Way Spur Backbone Connector. I got them off of Amazon. It was about two hundred dollars in cables, and connectors. RayMarine has done a good job of color coding things.
- Black with Blue Stripe (Backbone Cable)
- White with Black Stripe (Spur Cable)
I’ll run the backbone cable from the helm to the engine room, below the Salon. The Conversion is is simply with a SeaTalk (Female) to NMEA2000 (Female) cables. One for each gateway. The two most difficult parts of the install were. First, finding how to get the backbone cable and ethernet cables to where they needed to go. Secondly, was installing the oil and pressure sensors on the engines. Additionally, Its a bit cramped on the port engine. You will get a “T: for the existing oil pressure switch(s). Below is the wiring and connectors for one of the gateways.

Installed the Fox Marine MEFI-E Engine Gateways on the bulkhead in front of each of the engines. First, I mounted the SeaTalk 5 Way Spur Backbone connector in between both engines. Secondly, I connected both gateway’s and oil pressure / Temperature senders and the related wiring. Finally, I Wire wrapped and zip tied everything nicely. It looks professional. After all that lets hope this all works as it should?
NMEA2000 Network
So you may ask why I didn’t just setup a NMEA 2000 network in the engine room? Firstly, it was two fold. The NMEA 2000 network requires it own power. I already have that with the SeaTalk ng network. Secondly, it was cost neutral and was less complex. The two gateways so far are likely to be the only two wired NMEA 2000 devices. You will later find out I will be adding a few more devices to the NMEA 2000 network, but they will be wireless. I did a bit of research before I made a bit of a leap of faith in just using the RayMarine SeaTalk ng device.
Next, with that all said I spent several hours running the cables into the Salon from the Helm. They all seem go to the main electrical panel in the Salon. Currently the conduits are fairly full. I also cleaned up a few wiring mistakes made in previous installs. Lastly, I had to dissemble the aft cabin closet to get things run into the engine room. The backbone cable was almost too short, almost. That’s when I found more hidden stuff, like a RayMarine SR200. This is a nice piece of equipment. I suspected it was somewhere form the SRA-50 mounted to the radar arch, but I could not find it at the helm.
Gigabit Ethernet Network
So in the last segment, part one, were able to get the third party camera (Amcrest) working with the RayMarine Axiom. Now we will need to move the Gigabit switch to a central location (Engine Room), get the camera, POE Injectors and wiring to the back of the boat where it will be mounted. This is no easy task and took several hours to run power and ethernet cabling. I had to remove the existing RG56 cable that was used for cable. TV. The cable races are entirely full. Additionally, why would you have a cable outlet on the fly bridge exposed to the element’s?
There are some complexities associated with the RayMarine Axiom MFD. This is a black box, it provides WiFi, Bluetooth, DHCP. This is where the complexity comes in if you want the cameras and ship systems to operate after the Axiom is powered off. I’ve done some research and it isn’t pretty. The Axiom is closed and there is no easy way to get other network systems to interoperate with the Axiom. Its going to require routers, Vlans, and routing. I was hoping this was going to be easy. Additionally I like Cradlepoint, because they support WiFi as a WAN. For now I’m pulling the Cradlepoint out and leaving the Axiom on all the time.
The initial idea was to use the Cradlepoint as the WAN, WiFi, and DHCP for all the devices, including the Axiom. The Axiom provides DHCP, WiFi and routing capabilities. You can not turn off DHCP, and that is a problem. There can’t be two DHCP servers on the same network.
RayMarine SR200
Firstly, as I removed the panels to the closet. I Find this device just laying there, flashing away! So another four hundred dollars of technology I had no idea was on this boat. Allows for tracking weather tracking system. The Raymarine SR200 SiriusXM Satellite Weather Receiver for RayMarine Axiom, Axiom Pro, and Axiom+ displays with LightHouse 3.9 or newer software. The weather information is obtained from the weather industry’s leading experts and is delivered via satellite receiver through SiriusXM’s Marine Weather services. Its actually hooked up, just not mounted. So a nice find. So more stuff to figure out how it work with the Axiom.

RayMarine Axiom Integration – Part Two Conclusion
With the cables run and the gateway’s now hooked up to the network. We are complete with the installation of the Fox Engine gateways, the extension of the SeaTalk NG, HS networks, and Rear Camera’s. So the moment of truth is to turn the Axiom on and the engines and see if thing show up there. They do and I’m thrilled this all work flawlessly. What I can see is RPM, Oil Pressure, Oil temperature, Engine Hours. There are a few things missing that I can’t figure out. how to present it on the Axiom. I can see it on app that connects the gateways via Bluetooth. It takes a call to fox marine and they were very helpful and assisted me in sorting it out quickly. Below is a screenshot of the data off the gateways displayed on a custom configured screen the Axiom.


Now what is super perplexing is that one engine has a different number of hours. Those hours are vastly different. The Axiom is super powerful and addictive, so be warned. With that said, I now want everything on the I can get on to the Axiom.
- Raspberry PI Running – SignalK server, CANHAT (Influx dB & Grafana)
- A Pi CAN HAT Adapter
- WiFi Digital to Analog Conversion (Fuel Tanks, Water & Black Water Tanks) – ESP8266 & ESP32
- Engine Room Camera’s & Rear Camera (Complete Except for Mounting & Wiring)
So next will be the installation of the items above to get even more data points to display on the Axiom. We are going to convert the Analog Fuel and Water Tanks to digital wireless data acquisition. Additionally, we are going to attempt to leave all the old systems in place and augment them to provide the functionality. This is going to get real complex and interesting. Its winter project time!